Harmonisk planetär ramlös robotledsmotor
Harmonisk ledmotor
HONPINE harmoniska drivledsmotorer kännetecknas av hög precision, högt vridmoment och stor hålkärnediameter, och erbjuder ofta lösningar för applikationer i trånga utrymmen. Kundanpassning stöds, och dessa motorer används ofta inom området specialrobotik.
 Robotisk harmonisk växelmotor med högprecisionsenkodrar och STOHAG robotisk harmonisk växelmotor är ett robotledsställdon särskilt utformat för robotapplikationer. Den inbyggda drivaren är integrerad i växelmotorns bas och den är utrustad med högprecisionsenkodrar—20-bitars upplösning på höghastighetssidan och 19-bitars på utgångssidan—vilket möjliggör fullständig sluten reglering. Tillvalsfunktioner för STO och broms finns tillgängliga för att säkerställa säkrare drift av utrustningen.Detaljer
Robotisk harmonisk växelmotor med högprecisionsenkodrar och STOHAG robotisk harmonisk växelmotor är ett robotledsställdon särskilt utformat för robotapplikationer. Den inbyggda drivaren är integrerad i växelmotorns bas och den är utrustad med högprecisionsenkodrar—20-bitars upplösning på höghastighetssidan och 19-bitars på utgångssidan—vilket möjliggör fullständig sluten reglering. Tillvalsfunktioner för STO och broms finns tillgängliga för att säkerställa säkrare drift av utrustningen.Detaljer Människorobot harmonisk ledmodul med vridmomentsensor och integrerad kabelkontaktTCHL harmoniska ledmodul är en en harmonisk ledmodul som integrerar en momentsensor direkt i den harmoniska växelreduceraren. Momentsensorn möjliggör exakt mätning av drivsystemets driftsstatus och erforderliga momentvärden, vilket möjliggör noggrann lastdetektering av ställdonet. Detta hjälper till att förhindra överbelastning och möjliggör säkrare människa–robot-interaktion.
Människorobot harmonisk ledmodul med vridmomentsensor och integrerad kabelkontaktTCHL harmoniska ledmodul är en en harmonisk ledmodul som integrerar en momentsensor direkt i den harmoniska växelreduceraren. Momentsensorn möjliggör exakt mätning av drivsystemets driftsstatus och erforderliga momentvärden, vilket möjliggör noggrann lastdetektering av ställdonet. Detta hjälper till att förhindra överbelastning och möjliggör säkrare människa–robot-interaktion.
Modulen har fullt integrerade kablar och kontakter, vilket möjliggör snabba, exakta komponentanslutningar och säker, responsiv rörelsestyrning genom en höggradigt integrerad design.Detaljer Cobots robotarm T-typ harmonisk roterande ledmodulDen T-typ harmoniska ledmodulen är en högt integrerad robotledenhet som kombinerar en harmonisk växel, vridmomentsmotor, precisionssensorer, broms och drivenhet. Den kallas “T-typ” eftersom utgående fläns är vinkelrät mot motoraxeln, vilket bildar en T-formad layout som är idealisk för roterande robotleder.
Cobots robotarm T-typ harmonisk roterande ledmodulDen T-typ harmoniska ledmodulen är en högt integrerad robotledenhet som kombinerar en harmonisk växel, vridmomentsmotor, precisionssensorer, broms och drivenhet. Den kallas “T-typ” eftersom utgående fläns är vinkelrät mot motoraxeln, vilket bildar en T-formad layout som är idealisk för roterande robotleder.
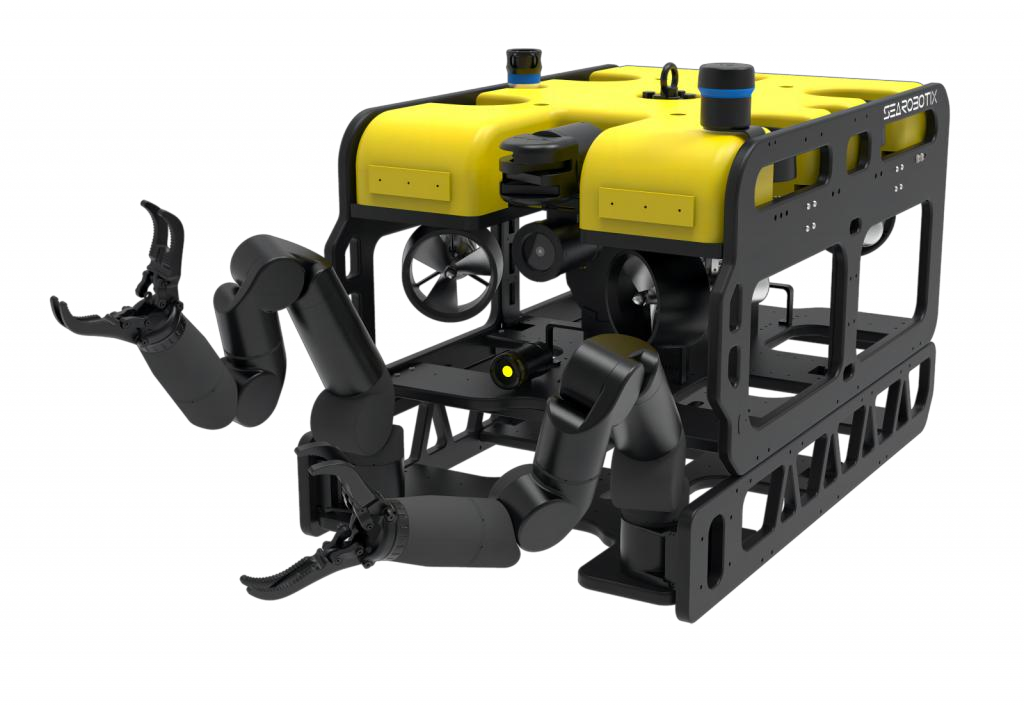
Modulen är utformad för kollaborativa robotar och förenklar utvecklingen genom att integrera nyckelkomponenter i en kompakt plug-and-play-enhet. Detta förkortar utvecklingscykeln avsevärt, sänker kostnaderna och gör det nästan lika enkelt att bygga en robotarm som att montera LEGO-block. Den höga integrationsgraden förbättrar också underhållseffektiviteten och utökar användbarheten för robotarmsteknik.Detaljer Förseglad robotledsmodul för specialrobot för undervattensdriftLedmodulen uppnår högt optimerad volym och vikt genom helt integrerade komponenter inklusive harmonisk växel, ramlös vridmomentsmotor, broms, encoder och drivare, vilket möjliggör exakt rörelsekontroll med större vridmomentsutgång, högre noggrannhet, mer kompakt storlek och lägre vikt. Vi erbjuder också kundanpassade lösningar för att uppfylla specifika krav för personliga tillämpningar och särskilda driftmiljöer, där de vanligaste anpassningarna är vattentäta versioner (motståndskraftiga mot vattenstänk, spray eller undervattensdrift upp till 1 meter djup) och anpassningar för låga temperaturer. Denna vattentäta ledmodul är särskilt utformad för specialrobotar som arbetar under vatten, utvecklad som en förbättrad version av vår standardledmodul med särskilda förbättringar för att hantera utmaningar med vattentätning i robotleder.Detaljer
Förseglad robotledsmodul för specialrobot för undervattensdriftLedmodulen uppnår högt optimerad volym och vikt genom helt integrerade komponenter inklusive harmonisk växel, ramlös vridmomentsmotor, broms, encoder och drivare, vilket möjliggör exakt rörelsekontroll med större vridmomentsutgång, högre noggrannhet, mer kompakt storlek och lägre vikt. Vi erbjuder också kundanpassade lösningar för att uppfylla specifika krav för personliga tillämpningar och särskilda driftmiljöer, där de vanligaste anpassningarna är vattentäta versioner (motståndskraftiga mot vattenstänk, spray eller undervattensdrift upp till 1 meter djup) och anpassningar för låga temperaturer. Denna vattentäta ledmodul är särskilt utformad för specialrobotar som arbetar under vatten, utvecklad som en förbättrad version av vår standardledmodul med särskilda förbättringar för att hantera utmaningar med vattentätning i robotleder.Detaljer Stor harmonisk roterande ställdon med ihålig genomföringDet roterande ställdonet med stor ihålig genomföring integrerar vanligtvis en intern rotor vridmomentsmotor utan ram med komponenter som en harmonisk växelreducerare, absolutkodare och anpassad harmonisk enhet med stor ihålig genomföring för att bilda en komplett roterande ställdonsenhet. Dess styrenhet (drivsystem) är vanligtvis externmonterad, vilket möjliggör högprecisions rörelsestyrning för ansluten utrustning. Jämfört med standard roterande ställdon har denna serie en större diameter på den ihåliga genomföringen, vilket möjliggör passage av kulskruvar, kablar och andra komponenter. Den är utformad för tillämpningar som kräver stort genomgående hålutrymme, hög precision och kompakt integration, såsom roterande bord för verktygsmaskiner, medicintekniska precisionsenheter, 5-axliga laserskärningssystem och halvledarutrustning.Detaljer
Stor harmonisk roterande ställdon med ihålig genomföringDet roterande ställdonet med stor ihålig genomföring integrerar vanligtvis en intern rotor vridmomentsmotor utan ram med komponenter som en harmonisk växelreducerare, absolutkodare och anpassad harmonisk enhet med stor ihålig genomföring för att bilda en komplett roterande ställdonsenhet. Dess styrenhet (drivsystem) är vanligtvis externmonterad, vilket möjliggör högprecisions rörelsestyrning för ansluten utrustning. Jämfört med standard roterande ställdon har denna serie en större diameter på den ihåliga genomföringen, vilket möjliggör passage av kulskruvar, kablar och andra komponenter. Den är utformad för tillämpningar som kräver stort genomgående hålutrymme, hög precision och kompakt integration, såsom roterande bord för verktygsmaskiner, medicintekniska precisionsenheter, 5-axliga laserskärningssystem och halvledarutrustning.Detaljer Högt integrerad kompakt harmonisk robotledsmotorRobotledmotorn för led uppnår mycket exakt rörelsekontroll genom integrerade komponenter inklusive harmonisk växel, ramlös vridmomentsmotor, broms, encoder och drivenhet, med optimerad storlek och vikt. Den levererar större vridmoment, högre precision, mer kompakt storlek och lägre vikt. Vi erbjuder även kundanpassade tjänster enligt kundernas specifika krav.
Högt integrerad kompakt harmonisk robotledsmotorRobotledmotorn för led uppnår mycket exakt rörelsekontroll genom integrerade komponenter inklusive harmonisk växel, ramlös vridmomentsmotor, broms, encoder och drivenhet, med optimerad storlek och vikt. Den levererar större vridmoment, högre precision, mer kompakt storlek och lägre vikt. Vi erbjuder även kundanpassade tjänster enligt kundernas specifika krav.
Robotledmotorer stöder vanligtvis ett brett spänningsområde på DC24V~DC48V. Som en kärnkomponent inom robotindustrin kommer den tekniska utvecklingen av robotledmotorer att fortsätta främja utvecklingen av specialiserade robotar och humanoida robotar mot högre flexibilitet och bredare tillämpningsscenarier. Utöver robotik används robotledmotorer även inom halvledarutrustning, solcellsutrustning, medicinsk precisionsutrustning, 3C-utrustning, optisk utrustning och andra områden.Detaljer






Planetär ledmotor
Den planetära ledmotorn är också en kärnkomponent i robotars kraftsystem. Jämfört med harmoniska ledmoduler har den ett mindre utväxlingsförhållande, högre utgångshastighet och större styvhet, men något lägre total utgångsnoggrannhet. Genom högt integrerade komponenter inklusive planetväxlar, ramlösa vridmomentmotorer, bromsar, kodare och drivsystem optimeras dess storlek och vikt avsevärt, vilket möjliggör exakt rörelsestyrning av leder. Detta ger högre vridmoment, mer kompakta mått och lägre vikt. Planetära ledmotorer stöder vanligtvis ett brett spänningsområde och anpassar sig till lågspänd DC 24V~48V. Vi erbjuder även kundanpassade lösningar baserade på individuella kundkrav.
 Robust explosionssäker robotdog planetspecifik ledaktuatorHONPINE’s kraftiga explosionssäkra planetära ledaktuatorer har officiellt gått in i massproduktion. Denna serie leder har framgångsrikt integrerats i flera plattformar för fyrbenta robotar (robothundar) och tagits i bruk i farliga miljöer såsom petrokemiska anläggningar, inspektionsplatser för naturgas och insatser vid räddningsarbete—områden som tidigare i hög grad förlitade sig på manuellt arbete eller importerade komponenter.
Robust explosionssäker robotdog planetspecifik ledaktuatorHONPINE’s kraftiga explosionssäkra planetära ledaktuatorer har officiellt gått in i massproduktion. Denna serie leder har framgångsrikt integrerats i flera plattformar för fyrbenta robotar (robothundar) och tagits i bruk i farliga miljöer såsom petrokemiska anläggningar, inspektionsplatser för naturgas och insatser vid räddningsarbete—områden som tidigare i hög grad förlitade sig på manuellt arbete eller importerade komponenter.
Applikationsspecifikt integrationsstöd: Anpassade mekaniska strukturer och styrparametrar anpassade för olika robotkonfigurationer och uppdragskrav.
Hjälp med explosionssäker certifiering: Stöd genom hela certifieringsprocessen, vilket hjälper kunder att undvika vanliga designfel och påskynda efterlevnad.
Snabb teknisk support: Tekniska servicecenter finns i större industriella regioner över hela landet och erbjuder platsrespons inom 48 timmar.Detaljer Planetväxelledsmoduler med högsta vridmomentsutgång och låg viktHONPINE PA-seriens planetledsmoduler har tre exklusiva uppfinningspatent och sju bruksmodellpatent. Med en genialisk konstruktionsdesign levererar de det högsta vridmomentsuttaget bland produkter i samma klass, och erbjuder kraftfull och stabil prestanda.
Planetväxelledsmoduler med högsta vridmomentsutgång och låg viktHONPINE PA-seriens planetledsmoduler har tre exklusiva uppfinningspatent och sju bruksmodellpatent. Med en genialisk konstruktionsdesign levererar de det högsta vridmomentsuttaget bland produkter i samma klass, och erbjuder kraftfull och stabil prestanda.
HONPINE tillhandahåller omfattande produktresurser och teknisk support, vilket möjliggör snabb implementering i olika applikationsscenarier samtidigt som tiden, arbetsinsatsen och kostnaden som krävs under projektets förstudiefas minskas avsevärt.
Modulerna använder en gemensam in- och utgångsdesign för kraft och signal, vilket avsevärt förenklar anslutningen mellan drivenheterna. I kombination med en hålig genomföringsstruktur för kabeldragning blir tillämpningen och integreringen av drivenheterna mer bekväm och effektiv.Detaljer Kompakt lättviktsmodul för planetled med hög hastighet och slagtålighetStandard Planetary Joint Module är en kärnkomponent i robotiska kraftsystem. Genom en högt integrerad design som kombinerar en planetväxel, ramlös vridmomentsmotor, broms, encoder och drivenhet, uppnår den en betydande optimering av volym och vikt, vilket möjliggör exakt rörelsestyrning av leden. Detta resulterar i högre vridmoment, mindre storlek och lägre vikt. Jämfört med harmoniska ledmoduler har den planetära ledmodulen ett mindre utväxlingsförhållande, högre utgångshastighet och större vridmomentsdensitet, vilket gör den mer lämplig för medel- till lågbelastningsapplikationer. Vi erbjuder också anpassningstjänster skräddarsydda efter kundernas specifika krav.
Kompakt lättviktsmodul för planetled med hög hastighet och slagtålighetStandard Planetary Joint Module är en kärnkomponent i robotiska kraftsystem. Genom en högt integrerad design som kombinerar en planetväxel, ramlös vridmomentsmotor, broms, encoder och drivenhet, uppnår den en betydande optimering av volym och vikt, vilket möjliggör exakt rörelsestyrning av leden. Detta resulterar i högre vridmoment, mindre storlek och lägre vikt. Jämfört med harmoniska ledmoduler har den planetära ledmodulen ett mindre utväxlingsförhållande, högre utgångshastighet och större vridmomentsdensitet, vilket gör den mer lämplig för medel- till lågbelastningsapplikationer. Vi erbjuder också anpassningstjänster skräddarsydda efter kundernas specifika krav.
Med kärnfördelar såsom hög hastighetsprestanda, slagtålighet och kompakt lättviktsdesign har Standard Planetary Joint Module blivit den föredragna lösningen för högbelastningsdrifter i humanoida robotar, specialrobotar, logistik-AGV:er och industriell automation, vilket driver framsteg inom robotprestanda och bredare tillämpningsscenarier.Detaljer



Ramlös vridmomentmotor
Den ramlösa vridmomentmotorn, en specialiserad typ av permanentmagnetisk synkronmotor (PMSM), består av två kärnkomponenter: rotorn och statorn, samtidigt som traditionella motorstrukturer såsom höljen, lager och axlar elimineras. Den är konstruerad för direkt integration i kundens mekaniska system och kräver att slutanvändaren tillhandahåller stödjande lager och kapslingar. Denna designfilosofi ger högre flexibilitet, mer kompakta mått och överlägsen prestanda, vilket gör den idealisk för applikationer med höga krav på utrymme, vikt och dynamiska egenskaper. Den utmärker sig i scenarier med hög precision och hög dynamisk respons, inklusive ledaktuering i humanoida robotar, precisa rotationsbord, medicinsk utrustning och industriella automationssystem.Ramlösa vridmomentmotorer delas vidare in i ramlösa motorer med inre rotor och ramlösa motorer med yttre rotor, beroende på deras strukturella konfiguration.
 FM2 ramlösa robotmotorer med hög vridmomenttäthetHONPINE FM2 ramlösa momentmotorer för robotik erbjuder högre prestanda och fler konfigurationsalternativ jämfört med FM1-serien, vilket gör dem lämpliga för ett bredare spektrum av applikationer. Motorförlusterna minskas med 20%, medan vridmomentet ökas med 10% jämfört med FM1-motorer, vilket ger längre driftsuthållighet.
FM2 ramlösa robotmotorer med hög vridmomenttäthetHONPINE FM2 ramlösa momentmotorer för robotik erbjuder högre prestanda och fler konfigurationsalternativ jämfört med FM1-serien, vilket gör dem lämpliga för ett bredare spektrum av applikationer. Motorförlusterna minskas med 20%, medan vridmomentet ökas med 10% jämfört med FM1-motorer, vilket ger längre driftsuthållighet.
FM2-serien finns i sex diametrar från φ50mm till φ127mm, med märkvarvtal från 1800 rpm till 5500 rpm, vridmoment från 0.36 Nm till 6.40 Nm, och uteffekt från 207 W till 608 W. Märkspänningar sträcker sig från 24 V till 70 V. Valfria konfigurationer inkluderar Hall-sensorer, temperatursensorer, och anpassningsbara ledningsalternativ.Dessa motorer används i stor utsträckning i kollaborativa robotar, humanoida robotar, fyrbenta robotar, industrirobotar, och medicinska rehabiliteringsrobotar.Detaljer") FM1 Kostnadseffektiva ramlösa borstlösa DC-motorer (BLDC)HONPINE FM1 ramlösa borstlösa DC-motorer (BLDC) är kompakta, högpresterande och kostnadseffektiva produkter. Finns i fyra storlekar (φ50mm–φ115mm), med märkvarvtal från 650 rpm till 5250 rpm, vridmoment från 0.3 Nm till 9.32 Nm och effekt från 165 W till 920 W. Märkspänningarna sträcker sig från 24 V till 70 V, med valfria Hall-sensorer, temperatursensorer och kabelkonfigurationer. De används i stor utsträckning i kollaborativa robotar, humanoida robotar, fyrbenta robotar och medicinska rehabiliteringsrobotar.Detaljer
FM1 Kostnadseffektiva ramlösa borstlösa DC-motorer (BLDC)HONPINE FM1 ramlösa borstlösa DC-motorer (BLDC) är kompakta, högpresterande och kostnadseffektiva produkter. Finns i fyra storlekar (φ50mm–φ115mm), med märkvarvtal från 650 rpm till 5250 rpm, vridmoment från 0.3 Nm till 9.32 Nm och effekt från 165 W till 920 W. Märkspänningarna sträcker sig från 24 V till 70 V, med valfria Hall-sensorer, temperatursensorer och kabelkonfigurationer. De används i stor utsträckning i kollaborativa robotar, humanoida robotar, fyrbenta robotar och medicinska rehabiliteringsrobotar.Detaljer FMK högt integrerade ramlösa momentmotorer för robotlederRamlösa momentmotorer, till skillnad från traditionella servomotorer, består endast av stator- och rotorkomponenter. Jämfört med motorer med ram erbjuder ramlösa motorer flexibel konfiguration och enkel installation. Med tanke på den ökande trenden mot högt integrerade drivsystem uppfyller ramlösa motorer bättre ingenjörernas förväntningar. Ingenjörer behöver inte längre ta hänsyn till motorgränssnitt i systemdesignen, vilket möjliggör maximal minskning av utrymmet som upptas av effektenheten i drivsystemet, vilket leder till högre systemintegration.HONPINE FMK ramlösa momentmotorer används nu i stor utsträckning i J1–J6-lederna hos kollaborativa robotar och dubbelarmsrobotar, gånglederna hos fyrbenta robotar och de flexibla lederna hos humanoida robotar.Detaljer
FMK högt integrerade ramlösa momentmotorer för robotlederRamlösa momentmotorer, till skillnad från traditionella servomotorer, består endast av stator- och rotorkomponenter. Jämfört med motorer med ram erbjuder ramlösa motorer flexibel konfiguration och enkel installation. Med tanke på den ökande trenden mot högt integrerade drivsystem uppfyller ramlösa motorer bättre ingenjörernas förväntningar. Ingenjörer behöver inte längre ta hänsyn till motorgränssnitt i systemdesignen, vilket möjliggör maximal minskning av utrymmet som upptas av effektenheten i drivsystemet, vilket leder till högre systemintegration.HONPINE FMK ramlösa momentmotorer används nu i stor utsträckning i J1–J6-lederna hos kollaborativa robotar och dubbelarmsrobotar, gånglederna hos fyrbenta robotar och de flexibla lederna hos humanoida robotar.Detaljer Kompakt lättviktig stomlös vridmomentsmotor med intern rotor och hög effekttäthetDen stomlösa vridmomentsmotorn med intern rotor är en specialiserad typ av permanentmagnetisk synkronmotor (PMSM) som består av två kärnkomponenter: rotorn och statorn. Rotorn är placerad invändigt, medan statorn är monterad utvändigt. Dess innovativa konstruktion eliminerar traditionella motorhus, lager och axlar och behåller endast rotor- och statorenheterna. Rotorn har vanligtvis en ringformad struktur integrerad med permanentmagneter, direkt monterad på lastaxeln. Statorn består av kopparlindningar och lamineringar som genererar elektromagnetiska krafter för att driva rotorns rotation. Denna konfiguration ger vridmomentsutgång genom effektiv magnetfältsinteraktion, vilket gör den idealisk för högprecisionsapplikationer såsom robotleder och industriell automation. Den möjliggör direkt lastdrivning och minimerar mekaniska transmissionsförluster.Detaljer
Kompakt lättviktig stomlös vridmomentsmotor med intern rotor och hög effekttäthetDen stomlösa vridmomentsmotorn med intern rotor är en specialiserad typ av permanentmagnetisk synkronmotor (PMSM) som består av två kärnkomponenter: rotorn och statorn. Rotorn är placerad invändigt, medan statorn är monterad utvändigt. Dess innovativa konstruktion eliminerar traditionella motorhus, lager och axlar och behåller endast rotor- och statorenheterna. Rotorn har vanligtvis en ringformad struktur integrerad med permanentmagneter, direkt monterad på lastaxeln. Statorn består av kopparlindningar och lamineringar som genererar elektromagnetiska krafter för att driva rotorns rotation. Denna konfiguration ger vridmomentsutgång genom effektiv magnetfältsinteraktion, vilket gör den idealisk för högprecisionsapplikationer såsom robotleder och industriell automation. Den möjliggör direkt lastdrivning och minimerar mekaniska transmissionsförluster.Detaljer

")


Vad är en harmonisk drivrobotledsmotor?
Den harmoniska ledmotorn uppnår mycket exakt rörelsestyrning genom integrerade komponenter inklusive harmonisk växel, ramlös vridmomentmotor, broms, kodare och drivenhet, med optimerad storlek och vikt.HONPINE harmoniska ledmotor erbjuder flexibla konfigurationsalternativ för att möta olika applikationsbehov, inklusive dubbla kodare, STO (Safe Torque Off), hållbromsar och integrerade vridmomentsensorer.

Val av harmonisk drivrobotledsaktuator
För att möta olika marknadskrav är HONPINE harmoniska drivrobotledsmotorer för närvarande indelade i tre huvudserier: HPJM, TCHL, och HAG.
Denna guide ger en inledande översikt för att hjälpa dig att välja den mest lämpliga aktuatorn för din applikation baserat på faktorer såsom kostnadskontroll, ledtid och grundläggande prestandakrav.
För detaljerat urval och teknisk support är du välkommen att kontakta oss för vidare diskussion.
Nyckelfunktioner
Denna serie har funnits på marknaden i över 5 år och erbjuder en fullt utvecklad och mogen ledlösning för humanoida robotar. Den integrerar en harmonisk växel, drivsystem, kodare och ramlös vridmomentmotor. Dubbla kodare och bromsalternativ finns tillgängliga. Stöder kommunikationsprotokollen CAN (proprietärt), CANopen, och EtherCAT.
Viktiga fördelar
Mycket kompakt design, vilket ger mer utrymme för systemintegration under motsvarande prestandakrav
Valfritt lågtemperaturfett, lämpligt för tuffa miljöer ned till -40°C
Genomsnittlig ledtid ≤ 4 veckor, vilket säkerställer stark produktionskapacitet
Applikationer
Idealisk för projekt som kräver stabil och tillförlitlig prestanda, snabb batchleverans eller drift i lågtemperaturmiljöer.
Anmärkningar
Denna serie utformades ursprungligen inte med vridmomentsensorer eller vattentätning. Kundanpassning är tillgänglig om sådana funktioner krävs, men ytterligare kostnad och längre ledtid bör förväntas.
Nyckelfunktioner
Denna nya serie, som ska lanseras i slutet av 2025, använder en egenutvecklad harmonisk växel, vilket möjliggör bättre kostnadskontroll. Den levereras som standard med dubbla kodare (absolut enkelvarv, 23-bitars upplösning) och stöder kommunikationsprotokollen CAN FD och EtherCAT. Valfria funktioner inkluderar broms och vridmomentsensor. Den integrerade terminalkabelstammen stöder kabeldragning genom hålaxel och kaskadkoppling av moduler.
Viktiga fördelar
Betydande kostnadsfördel
Stöder front-, sido- och bakmonteringskonfigurationer, vilket erbjuder hög strukturell flexibilitet
Kabelstamsdesignen underlättar enkel systemintegration
Applikationer
Idealisk för kostnadskänsliga projekt med höga krav på installationsflexibilitet.
Anmärkningar
För närvarande finns endast ett utväxlingsförhållande på 101 tillgängligt. Hela utbudet av utväxlingsförhållanden förväntas lanseras i juni 2026. Den nuvarande ledtiden är cirka 6 veckor.
Nyckelfunktioner
Denna nya serie lanserades 2026 och är utrustad med STO-funktion (Safe Torque Off) för att uppfylla specifika säkerhetskrav. Den använder harmoniska växlar från ledande inhemska varumärken, vilket säkerställer hög produkttillförlitlighet. Stöder kommunikationsprotokollen CANopen och EtherCAT, med valfri broms och vridmomentsensor.
Viktiga fördelar
Uppfyller högre säkerhetsstandarder
Utmärkt prestanda och tillförlitlig kvalitet hos kärnkomponenterna i växeln
Applikationer
Idealisk för projekt med tydliga säkerhetskrav eller där växelns tillförlitlighet är högsta prioritet.
Anmärkningar
Som en nyss lanserad serie håller produktionskapaciteten fortfarande på att byggas upp. Den nuvarande ledtiden är cirka 8–10 veckor.
Lösningar och applikationer för robotledsmotorer
Under många år har HONPINE tillämpat harmoniska robotledsmotorer och planetära ledmotorer inom olika områden, inklusive humanoida robotar, dubbelarmsrobotar, hjulrobotar, drönare, jordbruksmaskiner, kärnteknisk utrustning, industrirobotar och industriell automationsutrustning, och tillhandahållit lösningar för ledmotorer samt stöd för kundanpassning för dessa branscher. Deras HPJM-, TCHL-, HAG- och andra serier av robotledsmotorer har utvecklats baserat på erfarenheter från praktiskt arbete.
‹







›

Vilka är fördelarna och nackdelarna med harmonisk ledmotor
Fördelar med harmoniska ledmotorer
Ultrahög precision
Minimalt transmissionsglapp med upprepad positioneringsnoggrannhet upp till ±0.01 mm, vilket gör den oumbärlig för exakta robotoperationer.
Hög utväxlingsgrad
En stor utväxling i ett enda steg möjliggör högt vridmoment från en kompakt storlek, vilket ger effektiv prestanda för ”låg hastighet, hög belastning”.

Extremt kompakt design
Enkel struktur, liten storlek och lätt konstruktion, vilket gör den mycket lämplig för robotdelar med begränsat utrymme, såsom handleder och händer.
Hög integrationsförmåga
Säljs ofta som integrerade moduler som kombinerar motorer, kodare och andra komponenter, vilket möjliggör bekväm installation och underhåll samtidigt som det stöder modulär design.
Nackdelar med harmoniska ledmotorer
Den harmoniska växellådan och vridmomentsensorn i den harmoniska ledmotorn är specialutvecklade, vilket gör det svårt att sänka priset. Men inom en snar framtid, när efterfrågan och produktionskapaciteten når en viss nivå, kan priset sänkas.
Harmonisk drivrobotledsmodul - FAQ
HONPINE harmoniska DC-ledmotorer är harmoniska aktuatorer särskilt utformade för embodied intelligence. hpjm var den första harmoniska aktuatorn som lanserades och har för närvarande den mest stabila prestandan och den snabbaste leveranstiden. För att möta kundernas behov har vi nyligen lanserat två nya harmoniska DC-ledmotorer: TCHL och HAG. Kontakta oss för de senaste produktbroschyrerna.
Med den kontinuerliga expansionen av storskalig tillverkningskapacitet och pågående teknisk innovation, strävar HONPINE inte bara efter att leverera produkter som är tillförlitliga, massproducerbara, och kostnadseffektiva, utan också efter att påskynda industrialiseringen av humanoida robotar och robotar med förkroppsligad intelligens.
HONPINE:s harmoniska ledsmotorer har följande egenskaper:
Högt vridmoment
Hög precision
Hög utväxlingsgrad
Kompakt struktur
Lågt ljud
Låga vibrationer
De är särskilt lämpliga för robotarmsleder, där extremt höga krav på noggrannhet, kraftkontroll och lättviktsdesign är avgörande.
För de flesta modeller kan HONPINE kontrollera leveranstiden inom en månad. En liten del av produkterna kan vara under produktionsplanering på grund av kraftigt ökad orderingång. Vi utökar kontinuerligt vår produktionsskala för att öka kapaciteten.
Ja. Den använder en absolutgivare med flera varv. Men på grund av en reduktionsväxel vid utgången krävs ett batteri för givaren för att behålla flervarvspositionsräkningen. Anpassning stöds, vilket gör det möjligt att välja motorn med eller utan givarbatteri.
En robotledaktuator är en integrerad rörelsestyrningsenhet som kombinerar en harmonisk reduktionsväxel, servomotor, enkoder, broms, styrenhet och precisionslager i en kompakt modul. Den kallas även integrerad aktuator med harmonisk växel, drivenhetsmodul för robotled, integrerad robotled eller roterande robotaktuatorsmodul, och fungerar som det centrala kraftöverföringssystemet i moderna robotar.
Tack vare sin modulära arkitektur kan flera ledmoduler med harmoniska växlar kombineras för att bygga robotarmar med flera frihetsgrader, humanoida robotar, exoskelett, servicerobotar och kundanpassad automationsutrustning.
Små modeller används i stor utsträckning i:Kameragimbaler,UAV:er och drönare,Inspektionsrobotar,Medicintekniska produkter
Stora modeller är idealiska för:Industriella robotarmar,Humanoida robotar,Kollaborativa robotar,Mobila robotar,Logistikrobotar
,Specialrobotar,CNC-automationsutrustning
Den snabba utvecklingen av humanoida robotar driver kontinuerlig innovation inom harmoniska robotleder och robotledaktuatorer. Som de centrala rörelseenheterna för robotars axlar, armbågar, handleder, midjor och ben blir moderna harmoniska aktuatorsystem lättare, mer kompakta och kraftfullare. Avancerade konstruktioner förbättrar vridmomenttäthet, positioneringsnoggrannhet och rörelseprestanda samtidigt som vikt och installationsutrymme minskas. Samtidigt förbättrar optimerade kuggprofiler, höghållfasta material, förbättrad smörjning, tätning och termisk hantering hållbarhet, slagtålighet och livslängd. Dessa framsteg gör det möjligt för humanoida robotar att utföra mer precisa, tillförlitliga och människoliknande rörelser inom industriella tillämpningar, service och forskning.
Hög precision Ingrepp med flera tänder fördelar transmissionsfel, vilket ger utmärkt positioneringsnoggrannhet och extremt lågt glapp.
Stort reduktionsförhållande Enstegs reduktionsförhållanden ligger vanligtvis mellan 30:1 och 320:1, medan kundanpassade konstruktioner överstiger 1000:1.
Kompakt storlek Jämfört med konventionella växellådor erbjuder en kompakt robotledmodul betydligt mindre dimensioner samtidigt som motsvarande vridmomentutgång bibehålls.
Hög integration En integrerad led med harmonisk växel kombinerar motor, reduktionsväxel, enkoder, broms och styrenhet i ett kompakt paket, vilket förenklar installationen.
Jämn rörelse Låg glidhastighet mellan tänderna minimerar vibrationer och stötar samtidigt som transmissionseffektiviteten bibehålls mellan 69% och 96%.
Även om harmoniska växelaktuatorer erbjuder exceptionell precision har de också vissa tekniska begränsningar.
Begränsad slagtålighet
Flexspline-komponenten genomgår kontinuerligt elastisk deformation, vilket gör harmoniska transmissioner mindre lämpliga för tillämpningar med frekventa stötar, såsom robotar som hoppar, springer eller faller.
Lägre torsionsstyvhet
Jämfört med planetväxellådor eller RV-reduktionsväxlar uppvisar harmoniska växlar generellt lägre torsionsstyvhet.
Utmaningar med värmehantering
Högt integrerade aktuatorkonstruktioner minskar det tillgängliga utrymmet för värmeavledning, vilket kräver optimerade kylningsstrategier.
Begränsningar för reduktionsförhållande
Harmoniska växlar rekommenderas generellt inte för tillämpningar som kräver reduktionsförhållanden under cirka 35:1.
Våra moduler med harmonisk växel har en högprecisionskodarupplösning på 16 bitar, vilket ger 65,536 diskreta positioner per varv. Detta innebär att hela 360° rotationen delas in i extremt fina steg för exceptionell positionsnoggrannhet vid motoränden.
Även om harmoniska växelaktuatorer erbjuder exceptionell precision har de också vissa tekniska begränsningar.
Begränsad slagtålighet
Flexspline-komponenten genomgår kontinuerligt elastisk deformation, vilket gör harmoniska transmissioner mindre lämpliga för tillämpningar med frekventa stötar, såsom robotar som hoppar, springer eller faller.
Lägre torsionsstyvhet
Jämfört med planetväxellådor eller RV-reduktionsväxlar uppvisar harmoniska växlar generellt lägre torsionsstyvhet.
Utmaningar med värmehantering
Högt integrerade aktuatorkonstruktioner minskar det tillgängliga utrymmet för värmeavledning, vilket kräver optimerade kylningsstrategier.
Begränsningar för reduktionsförhållande
Harmoniska växlar rekommenderas generellt inte för tillämpningar som kräver reduktionsförhållanden under cirka 35:1.
Även om HONPINE standardrobotledmoduler inte inkluderar integrerad vridmomentsmätning, kan vi tillgodose krav på vridmomentsavkänning genom att integrera en extern vridmomentsensor. Vänligen kontakta vårt tekniska team för kundanpassade lösningar.
På grund av den mycket kompakta designen hos vårt integrerade drivsystem, inkluderar HONPINE nuvarande robotledsmoduler inte allmänna I/O-stift. Denna strömlinjeformade design möjliggör optimal platsbesparing i robotapplikationer.
Fullständiga mekaniska specifikationer inklusive massa och volym för alla modulvarianter finns tillgängliga i vår broschyr för modellval. Ladda ner broschyren från vårt resursavsnitt eller kontakta vårt säljteam för specifika dimensionskrav.
Baserat på CAN-protokollet kräver en enskild motor 0.5ms för varje sändning och mottagning. För flera motorer ackumuleras denna tid därefter.
I princip kan en huvudstyrenhet hantera fyra moduler. Även om den normala kommunikationscykeln är 0.5ms per transmission, upprätthålls detta intervall inte konsekvent—till exempel är högfrekvenssampling onödig under larmtillstånd eller liknande förhållanden.
En harmonisk ledmodul uppnår exakt positions- och vridmomentsstyrning för robotleder genom den harmoniska växelns höga utväxlingsförhållande (typically 50–160:1) och låga glapp (less than 1 arcmin).
Dessutom integrerar modulen kodare och vridmomentsensorer, vilket möjliggör vridmomentsjustering i realtid med en noggrannhet på ±0.1 N·m, vilket gör den väl lämpad för flexibla och följsamma monteringsuppgifter.
En harmonisk ledmodul stöder robotleders rotationsrörelse och uppnår en repeterbar positioneringsnoggrannhet på upp till ±0.001°.
Den levererar hög vridmomenttäthet (>100 N·m/kg) inom ett kompakt utrymme, vilket gör den idealisk för tillämpningar som:
Humanoida robotleder
Svets- och hanteringsrobotar
Medicinsk utrustning
Industriell automationsutrustning
Elektriska drivsystem
Servicerobotar och andra robotsystem
Den ihåliga axelkonstruktionen gör att kablar, pneumatiska ledningar, eller signalkablar kan dras genom mitten, vilket minskar ledens diameter och gör kabeldragningen enklare och mer tillförlitlig. Detta minskar kabeldragningens komplexitet avsevärt och förbättrar den övergripande systemintegrationen i robotapplikationer.
Att välja en robotisk aktuator-modul med harmonisk växel kräver utvärdering av viktiga prestandafaktorer, inklusive vridmomentstäthet, repeterbarhet, styrarkitektur, mekanisk konstruktion, kommunikationskapacitet och miljömässig tillförlitlighet. Hög vridmomentstäthet förbättrar lastkapaciteten samtidigt som systemets totala vikt minskas, och precisionsapplikationer kräver vanligtvis repeterbarhetsnivåer upp till ≤15–20 bågsekunder. Avancerade moduler använder ofta sluten reglering med dubbla absoluta enkodrar för att kompensera för glapp och överföringsfel, vilket förbättrar rörelsenoggrannheten. Ihåliga axelstrukturer möjliggör intern kabeldragning för bättre integration och tillförlitlighet. Industriella kommunikationsprotokoll som EtherCAT och CAN FD med högfrekvent servostyrning säkerställer snabb och stabil prestanda. Dessutom måste tillförlitliga aktuatorsystem genomgå rigorösa tester av temperaturområde, utmattningslivslängd, överbelastning, stötar, vibrationer och IP-skydd för att säkerställa långsiktig industriell stabilitet.
Kärnparametrar
16-bitars upplösning: 65,536 pulser per motorvarv.
Utväxlingsförhållande: t.ex., 101:1 betyder att utgången roterar en gång för varje 101 motorvarv.
Utgångshastighet
Utgångshastighet = motorhastighet ÷ utväxlingsförhållande.
Exempel: motor vid 1 varv/sek (65,536 pulser/sek) med ett förhållande på 101:1 → utgången fullbordar 1 varv på 101 sekunder.
Enhetsomvandling
Rad/s omvandlingar:
1 rad/s ≈ 57.3 °/s
1 rad/s ≈ 9.55 rpm
Puls/s ↔ rpm (16-bitars encoder):
1 rpm ≈ 1092.27 pulser/s
1 puls/s ≈ 1/1092.27 rpm
Obs: Beräkningar baseras på fysiska samband. Till exempel, 1 rad/s = 60/(2π) rpm.
De senaste teknikerna för harmoniska robotställdon fokuserar på tre huvudsakliga utvecklingsriktningar.
Lätta integrerade strukturer
Genom att använda magnesiumlegeringar, lätta höljen och optimerade mekaniska layouter fortsätter tillverkarna att minska vikten samtidigt som ställdonets längd förkortas.
Högre precision och större effekttäthet
Kontinuerliga förbättringar av motorkonstruktion, harmoniska växlar, enkoderupplösning och servoalgoritmer ökar vridmomenttäthet, positioneringsnoggrannhet och dynamisk respons.
Förbättrad tillförlitlighet
Framsteg inom material för flexspline, optimering av tandprofil, värmebehandling, tätningstekniker och smörjsystem förbättrar avsevärt hållbarheten under krävande industriella förhållanden.
Trots ökande konkurrens från planetväxelsystem och RV-reduktionsväxlar är precisionsaktuatorsystem med Harmonic Drive fortfarande svåra att ersätta i applikationer som kräver:
Noll eller ultralågt glapp
Hög positioneringsnoggrannhet
Kompakt integrerad konstruktion
Lätta robotleder
I takt med att humanoida robotar kräver större slagtålighet för leder i underkroppen blir planetväxlar allt vanligare i höfter och ben. Robotmoduler med Harmonic Drive fortsätter dock att dominera precisionskänsliga applikationer som robotarmar, handleder, kollaborativa robotar, medicinska robotar och servicerobotar.
I stället för att en teknik ersätter en annan går branschen mot applikationsspecifikt val av drivlina, där harmoniska, planetära och RV-lösningar samexisterar för att optimera prestandan för olika robotsystem.
HPJM harmonic drive-moduler använder en annan säkerhetsmetod. Istället för STO, integrerar vi ett tillförlitligt inbyggt elektromagnetiskt bromssystem som automatiskt aktiveras för att omedelbart stoppa rotationen när strömmen kopplas bort, vilket säkerställer säker drift.
Den nya 2026 HONPINE HAG harmoniska robotledsmotorn med växel har en STO-funktion. Kontakta oss för att få mer information om HAG-serien.
Planetär ledmotor - FAQ
JRM planetära ledmotor är en produkt i militär klass från HONPINE, som ofta används i högpresterande robot hundar. För närvarande är HPJM harmoniska ledmotor för humanoid robotbionik på väg att lanseras, med en mer kompakt design och en större hålighet.
De interna kugghjulen i HONPINE planetväxelmotor är tillverkade av höghållfast legerat stål, behandlade med uppkolning och härdning, vilket uppnår en ythårdhet på HRC 58–62. I kombination med livsmedelsgodkänt smörjfett överstiger livslängden 10,000 timmar under nominella driftsförhållanden, motsvarande cirka 14 månaders kontinuerlig industriell drift utan att byta ut kärnkomponenter.
Dessutom har motorn en modulär tätningsdesign med en kapslingsklass på IP65, som effektivt motstår damm och vätskestänk, vilket gör den lämplig för särskilda miljöer såsom livsmedelsbearbetning och billackering.
De standardiserade gränssnitten och den avtagbara ändkåpsdesignen möjliggör underhåll utan att demontera hela roboten—moduler kan bytas ut direkt, vilket avsevärt minskar stilleståndstid och underhållskostnader.
Från industriella tillämpningar såsom sortering med SCARA-robotar och lastning och lossning med sexaxliga robotarmar, till medicinska tillämpningar inklusive rehabiliteringsutrustning och precisionsstyrning av kirurgiska robotar, och vidare till marknader på konsumentnivå såsom simulering av gång för bioniska robotar och stabilisering av UAV-gimbaler, stöder modulen flera kommunikationsprotokoll, inklusive CAN och RS485, vilket möjliggör snabb kompatibilitet med styrsystem från olika varumärken.
Ännu viktigare är att kombinationen av lättviktsdesign och hög vridmomenttäthet skapar stark användningsmångsidighet:
Modeller i liten storlek kan byggas in i UAV-gimbaler, vilket säkerställer jämn 360° rotation utan att öka nyttolasten.
Större modeller kan integreras i AGV-drivhjul, och stödjer 24-timmars kontinuerlig drift för att möta kraven på oavbruten lager- och logistikverksamhet.
För att uppfylla de stränga precisionskraven inom industriell tillverkning använder modulen en reduktionsstruktur med snedskuren planetväxel. Genom optimerad utformning av kuggytan hålls kuggspelet inom 10 arcminutes (approximately 0.167°), vilket uppnår en repeterbar positioneringsnoggrannhet på ±12 arcminutes.
I kombination med en 3 kHz högfrekvent styrsignal och en svarstid på ≤200 μs undviker systemet produktförlust orsakad av fördröjning eller positioneringsfel, även vid operationer på mikronnivå såsom montering av elektroniska precisionskomponenter och svetsning av flikar på litiumbatterier.
För applikationer med hög belastning använder modulen kugghjulsmaterial och lagerstrukturer av militär kvalitet med förstärkning. Toppmomentet når upp till 36 Nm, medan stallmomentet överstiger 24 Nm, motsvarande att stabilt lyfta en last på 3.6 kg. Detta ger stark och tillförlitlig kraft för lastbärande förflyttning i fyrbenta robotar och assisterad rehabilitering i exoskelettrobotar.
Harmonic Drive-ställdon för humanoida robotar- Vanliga frågor
Detta är några av de vanligaste tekniska frågorna och inköpsfrågorna som kunder ställer när de utvärderar ledmoduler och ställdonsystem för humanoida robotar. Ämnena omfattar val av vridmoment, utväxlingsförhållanden för växellådor, rörelsestyrning, kommunikationsprotokoll, värmehantering, dynamisk gångprestanda och integration med plattformar för humanoida robotar.
Denna guide är avsedd att hjälpa ingenjörer, robotutvecklare och inköpsteam att bättre förstå hur man väljer lämpliga ledlösningar för olika storlekar på humanoida robotar, lastkrav och tillämpningsscenarier.
För fler lösningar för humanoida robotar, vänligen kontakta honpine
De interna kugghjulen i HONPINE planetväxelmotor är tillverkade av höghållfast legerat stål, behandlade med uppkolning och härdning, vilket uppnår en ythårdhet på HRC 58–62. I kombination med livsmedelsgodkänt smörjfett överstiger livslängden 10,000 timmar under nominella driftsförhållanden, motsvarande cirka 14 månaders kontinuerlig industriell drift utan att byta ut kärnkomponenter.
Dessutom har motorn en modulär tätningsdesign med en kapslingsklass på IP65, som effektivt motstår damm och vätskestänk, vilket gör den lämplig för särskilda miljöer såsom livsmedelsbearbetning och billackering.
De standardiserade gränssnitten och den avtagbara ändkåpsdesignen möjliggör underhåll utan att demontera hela roboten—moduler kan bytas ut direkt, vilket avsevärt minskar stilleståndstid och underhållskostnader.
Från industriella tillämpningar såsom sortering med SCARA-robotar och lastning och lossning med sexaxliga robotarmar, till medicinska tillämpningar inklusive rehabiliteringsutrustning och precisionsstyrning av kirurgiska robotar, och vidare till marknader på konsumentnivå såsom simulering av gång för bioniska robotar och stabilisering av UAV-gimbaler, stöder modulen flera kommunikationsprotokoll, inklusive CAN och RS485, vilket möjliggör snabb kompatibilitet med styrsystem från olika varumärken.
Ännu viktigare är att kombinationen av lättviktsdesign och hög vridmomenttäthet skapar stark användningsmångsidighet:
Modeller i liten storlek kan byggas in i UAV-gimbaler, vilket säkerställer jämn 360° rotation utan att öka nyttolasten.
Större modeller kan integreras i AGV-drivhjul, och stödjer 24-timmars kontinuerlig drift för att möta kraven på oavbruten lager- och logistikverksamhet.
För att uppfylla de stränga precisionskraven inom industriell tillverkning använder modulen en reduktionsstruktur med snedskuren planetväxel. Genom optimerad utformning av kuggytan hålls kuggspelet inom 10 arcminutes (approximately 0.167°), vilket uppnår en repeterbar positioneringsnoggrannhet på ±12 arcminutes.
I kombination med en 3 kHz högfrekvent styrsignal och en svarstid på ≤200 μs undviker systemet produktförlust orsakad av fördröjning eller positioneringsfel, även vid operationer på mikronnivå såsom montering av elektroniska precisionskomponenter och svetsning av flikar på litiumbatterier.
För applikationer med hög belastning använder modulen kugghjulsmaterial och lagerstrukturer av militär kvalitet med förstärkning. Toppmomentet når upp till 36 Nm, medan stallmomentet överstiger 24 Nm, motsvarande att stabilt lyfta en last på 3.6 kg. Detta ger stark och tillförlitlig kraft för lastbärande förflyttning i fyrbenta robotar och assisterad rehabilitering i exoskelettrobotar.
Roboten kan gå in i ett enbensstödstillstånd, så tillräcklig säkerhetsmarginal måste reserveras för den övre kroppens nyttolast längst bort.
Dynamisk simulering utförs vanligtvis baserat på beräkningar av tyngdpunkt och hävarm.
Ja.
Parametrar som höjd, vikt, armspann, armens nyttolast och maximala förhållanden för utsträckt last krävs alla.
Det kan inte beräknas exakt utan en tydligt definierad nyttolast.
Du kan använda vår befintliga 170A-modell som referens.
Arbetsnyttolasten för överkroppen måste också beaktas.
Det beror på kommunikationsprotokollet.
Om protokollet följer standarden DS402, stöds ROS2.
Privata protokoll stöds i allmänhet inte.
HONPINE har starka systemtekniska kapaciteter inom flera områden, inklusive:
Avkänningstekniker
Energisystem
Rörelse och aktivering
Industriell design
Denna tvärvetenskapliga integration förkortar avsevärt utvecklingscykeln för kunder inom humanoida robotar, särskilt från koncept (0) till initial driftsättning (1).
Latensen ligger generellt på mikrosekundnivå (µs).
Typiska motorstyrningscykler fungerar vid omkring 1 ms.
HONPINE integrerade ledmoduler kombinerar flera kärnteknologier i en enda kompakt enhet, inklusive:
Servostyrning
Motordrivning
Momentavkänning
Transmissionssystem
Värmehantering
Jämfört med traditionella servomotorsystem erbjuder HONPINE lösningar:
Högre integration och lägre vikt
Högre toppmomentutgång
Högre precision och styrprestanda
HONPINE strävar efter att minska de tekniska hindren för kunder som utvecklar robotar och automationssystem, vilket möjliggör snabbare utveckling och implementering.
Inte nödvändigtvis.
Versioner med integrerade drivare inkluderar redan FOC-styrning internt.
16 kHz är standardfrekvensen som vanligtvis används för styrning av DC-motorer.
Positionsstyrning är generellt mer lämpligt.
Eftersom elastisk deformation finns, kan PT-läge (position + vridmoment synkron styrning) också användas.
HONPINE:s fabriks- och tekniska team kan gemensamt tillhandahålla stöd för integration.
Det beror på om harmoniska växlar eller planetväxlar används.
Planetväxlar tenderar att förlora precision snabbare.
Harmoniska växlar slits också med tiden, men även efter att precisionen har försämrats kan de fortfarande bibehålla noggrannhet på bågsekundnivå.
Genom aktiva kyl- och vätskekylningssystem.
De är olika parametrar.
Kontinuerligt vridmoment avser varaktigt driftvridmoment.
Maximalt vridmoment avser momentant stötvridmoment innan skada kan uppstå.
Det beror på den humanoida robotens storlek, såsom 1.2 m, 1.4 m, 1.7 m, eller 2.4 m.
Nyttolasten på överkroppen spelar också roll. Momentkraven bör beräknas baserat på lastkapaciteten.
Inte nödvändigtvis.
Det beror på den humanoida robotens storlek (1.2 m, 1.4 m, 1.7 m, 2.4 m, etc.) och överkroppens nyttolast.Olika vridmomentsnivåer bör väljas enligt belastningskraven.
Kärnlösa motorer har vanligtvis en längre axiell längd och större total volym, medan ramlösa vridmomentsmotorer är mer kompakta i tjocklek.
Valet beror på applikationens position.
Till exempel:
Fingerfärdiga händer kan använda kärnlösa motorer.
Ramlösa vridmomentsmotorer, med kortare axiella dimensioner, är mer lämpade för armar och liknande strukturer.
Det beror på den erforderliga styrprecisionen och applikationsmiljön.
Till exempel kräver industriell hantering och industriell montering olika precisionsnivåer.
Det lämpliga glappet bör väljas utifrån det faktiska applikationsscenariot.
Det beror på om en harmonisk växel eller en planetväxel används.
Reduktionsförhållanden för harmoniska växlar är vanligtvis: 30, 50, 80, 100, 121, 161.
Reduktionsförhållanden för planetväxlar är i allmänhet under 50.
Förhållandet bör väljas tillsammans med den övergripande storleken och den strukturella utformningen.
Försiktighetsåtgärder vid användning av robotledmoduler
För mer information om förhandsförsäljning och efterförsäljningsärenden gällande ledmoduler, vänligen kontakta oss. HONPINE kommer att tillhandahålla teknisk support en-till-en.
● Säker drift:Koppla inte in eller ur kablar när strömmen är på. Innan kondensatorer kopplas bort, säkerställ att de är helt urladdade.
● Installation av utrustning: Bekräfta att installationsstrukturen har tillräcklig mekanisk hållfasthet för att bära vikten av den integrerade leden och säkerställ säker montering.
● Skruvåtdragning: Vid åtdragning av skruvar mellan motorn och konstruktionskomponenter måste gänglåsningslim och en momentnyckel användas. Följ strikt momentspecifikationerna som anges i motorhandboken.
● Kabeldragningsstandarder: Utför kabeldragning strikt enligt stiftdefinitionen. Förlita dig inte på kabel färger för identifiering, och säkerställ korrekt resistansanpassning.
● Användning av strömförsörjning: Kontrollera att strömförsörjningens spänning matchar den integrerade ledens märkspänning. När användare ansluter externa litiumbatterier, om märkspänningen är 48V, kan den fulladdade batterispänningen överstiga 60V vid start, vilket kan påverka motorns drift eller till och med skada motorn. Förebyggande åtgärder inkluderar installation av elektrolytkondensatorer för spänningsutjämning eller anslutning av en spänningsreglermodul i serie med motorns strömingång för att stabilisera matningsspänningen.
● Batteridrivna strömförsörjningssystem: I batteridrivna system kan batteriet självt absorbera omvänd ström och hjälpa till att förhindra att spänningen överskrider den nominella gränsen.
● System med switchad strömförsörjning: I system med switchad strömförsörjning kan den integrerade motorn generera regenerativ energi under snabb retardation eller när den drivs av gravitationslaster, vilket får DC-bussens spänning att stiga och potentiellt utlösa överspänningslarm. För att förhindra detta rekommenderas det att installera elektrolytkondensatorer med stor kapacitet parallellt eller lägga till bromsmotstånd för att minska spänningstoppar.
● Undvik elektriska stötar och klämskador: När motorn är strömsatt, i drift eller ansluten till konstruktionskomponenter, rör aldrig motorn direkt med handen för att undvika elektriska stötar eller klämskador orsakade av rörliga strukturer.
● Demontering av motor: Obehörig demontering av motorn är förbjuden. Demontering är endast tillåten under särskilda omständigheter efter konsultation och under professionell vägledning. Obehörig demontering gör garantin ogiltig.
● Transport efter demontering: Om motorn demonteras under vägledning och behöver returneras, säkerställ att alla originalskruvar återmonteras korrekt och säkras före leverans för att förhindra transportskador orsakade av vibrationer eller stötar, inklusive växellådsskruvar, bakre kåpskruvar och andra fästkomponenter.
Branschtrender
- 00
0000-00
Vad är en robotledsställdon?Hur väljer man det bästa roterande ställdonet för robotleder?
- 00
0000-00
DD-motorer VS harmoniska roterande ställdon
- 00
0000-00
OMG Ultrakompakt harmonisk drivledmodul med inbyggd vridmomentsensor
- 00
0000-00
Rollen för harmoniska växlar i att uppnå 5–10 μm noggrannhet i dentala fräsmaskiner
- 00
0000-00
Varför är harmoniska roterande ställdon perfekta för medicinsk utrustning?





Branschtrender
- 00
0000-00
Vad är en robotledsställdon?Hur väljer man det bästa roterande ställdonet för robotleder?
- 00
0000-00
DD-motorer VS harmoniska roterande ställdon
- 00
0000-00
OMG Ultrakompakt harmonisk drivledmodul med inbyggd vridmomentsensor
- 00
0000-00
Rollen för harmoniska växlar i att uppnå 5–10 μm noggrannhet i dentala fräsmaskiner
- 00
0000-00
Varför är harmoniska roterande ställdon perfekta för medicinsk utrustning?
