Industriell robotändeffect/Fingerfärdig robothand
Fingerfärdig robot hand
 Mekanisk exoskelett-handske för högprecisions-fjärrstyrningHonpine EG mekaniska exoskelett-handske är en exoskelett-handskeprodukt särskilt utvecklad för högprecisionsregistrering av handrörelser och assisterande styrning. Utrustad med kärnteknik för magnetisk encoder ger handsken inte bara hög precision vid detektering av handens ledvinklar utan eliminerar också positionsdrift. Dessutom möjliggör den högprecisions-fjärrstyrning av fingerfärdiga händer genom att integrera ESP-NOW trådlös överföringsteknik med en dynamisk mappningskalibreringsalgoritm. För närvarande används produkten i stor utsträckning inom industriell tillverkning, medicinsk rehabilitering, vetenskaplig forskning och andra områden, och uppfyller de praktiska tillämpningsbehoven i olika scenarier.Detaljer
Mekanisk exoskelett-handske för högprecisions-fjärrstyrningHonpine EG mekaniska exoskelett-handske är en exoskelett-handskeprodukt särskilt utvecklad för högprecisionsregistrering av handrörelser och assisterande styrning. Utrustad med kärnteknik för magnetisk encoder ger handsken inte bara hög precision vid detektering av handens ledvinklar utan eliminerar också positionsdrift. Dessutom möjliggör den högprecisions-fjärrstyrning av fingerfärdiga händer genom att integrera ESP-NOW trådlös överföringsteknik med en dynamisk mappningskalibreringsalgoritm. För närvarande används produkten i stor utsträckning inom industriell tillverkning, medicinsk rehabilitering, vetenskaplig forskning och andra områden, och uppfyller de praktiska tillämpningsbehoven i olika scenarier.Detaljer Intelligent robotik teleoperationshandske för VR AR fjärroperationerHONPINE teleoperationshandske är en högprecisionsenhet för registrering av handrörelser, utformad för intelligent robotik och fjärrstyrningsapplikationer. Baserad på avancerad teknik för rörelsefångst och företagets egenutvecklade dynamiska mappningsalgoritm möjliggör handsken exakt styrning av fingerfärdiga robothänder. Genom att registrera och överföra handrörelser i realtid kan användare styra robothänder på ett naturligt och intuitivt sätt, vilket uppfyller behoven i olika tillämpningsscenarier såsom fjärroperationer, virtuell verklighet (VR), förstärkt verklighet (AR) och smart tillverkning.Detaljer
Intelligent robotik teleoperationshandske för VR AR fjärroperationerHONPINE teleoperationshandske är en högprecisionsenhet för registrering av handrörelser, utformad för intelligent robotik och fjärrstyrningsapplikationer. Baserad på avancerad teknik för rörelsefångst och företagets egenutvecklade dynamiska mappningsalgoritm möjliggör handsken exakt styrning av fingerfärdiga robothänder. Genom att registrera och överföra handrörelser i realtid kan användare styra robothänder på ett naturligt och intuitivt sätt, vilket uppfyller behoven i olika tillämpningsscenarier såsom fjärroperationer, virtuell verklighet (VR), förstärkt verklighet (AR) och smart tillverkning.Detaljer- Högprecisionsstyrning 21-DoF industriell fingerfärdig människohandHONPINE L30 är en 21-DoF fingerfärdig hand som exakt återger fina mänskliga handrörelser med millimeternivå i driftprecision. Den använder avancerad senstyrning och högintegrerade mekatroniska system för stabil rörelse och exakt kontroll, och stöder multimodal perception (kraft, beröring, syn) för att förbättra realtidsperception och tillförlitlighet i interaktion. Med hög DoFs, multimodal perception och ledande rörelsekontrollalgoritmer används den i stor utsträckning inom industriell automation, medicinsk assistans och forskningsexperiment—och erbjuder en mycket anpassningsbar och tillförlitlig end-effector-lösning.Detaljer
- Högprecisions 21-DoF fingerfärdig hand för naturligt mänskligt handgreppHONPINE L20 är en 21-DoF fingerfärdig hand som noggrant simulerar naturligt mänskligt handgrepp med finmotoriska operationer. Den använder innovativ länktransmission och egenutvecklade motorer för rörelser med hög precision, och stöder kraft-, syn- och taktila sensorer—vilket förbättrar miljöanpassningsförmågan och intelligent interaktion via multimodal perception. Med höga frihetsgrader, multimodal perception och hybridalgoritmer för kraft-position används den i stor utsträckning inom utbildning & forskning, industriell automation, hushållsassistans och äldreomsorg—och erbjuder precisa, fingerfärdiga driftlösningar.Detaljer
- Högpresterande robotisk människolik bionisk fingerfärdig hand med exakt styrningHONPINE Robot Hand L10 är en högpresterande fingerfärdig hand med 20 DoFs. Utrustad med egenutvecklade motorer och länkdrivna transmissionsmekanismer säkerställer den stabil dragkraft samtidigt som den möjliggör exakt styrning och mjuka rörelser. Den används i stor utsträckning inom utbildning & forskning, pianospel, hushållsassistans och äldreomsorg, och driver utvecklingen och implementeringen av intelligenta robotar och samarbete mellan människa och robot. Den stöder multimodal
miljöperception via olika sensorer och är kompatibel med ROS/QT-miljöer (med standardiserade ROS-plugins för sekundär utveckling).Detaljer  Högpresterande 17 DoFs fingerfärdig hand för robotsystemHONPINE 07 robothand är en högpresterande fingerfärdig hand med 17 DoFs. Driven av egenutvecklade motorer balanserar den kostnadskontroll med tillförlitlig grip- och driftprestanda och uppfyller olika applikationsbehov. Den tillhandahåller ROS-plugins för sekundär utveckling, lämplig för utbildning & forskning, assisterande gripning och intelligent interaktion—och erbjuder en effektiv, ekonomisk lösning med fingerfärdig hand för robotsystem.Detaljer
Högpresterande 17 DoFs fingerfärdig hand för robotsystemHONPINE 07 robothand är en högpresterande fingerfärdig hand med 17 DoFs. Driven av egenutvecklade motorer balanserar den kostnadskontroll med tillförlitlig grip- och driftprestanda och uppfyller olika applikationsbehov. Den tillhandahåller ROS-plugins för sekundär utveckling, lämplig för utbildning & forskning, assisterande gripning och intelligent interaktion—och erbjuder en effektiv, ekonomisk lösning med fingerfärdig hand för robotsystem.Detaljer- Högprecis kompakt bionisk fingerfärdig hand med hög gripkraftHONPINE O6 bionisk fingerfärdig hand har 6 aktiva leder och 5 passiva leder. Den erbjuder hög gripkraft, exakt kraftkontroll, kompakt storlek och lättviktsdesign. Den är särskilt lämplig för tillämpningar såsom logistikhållning, industriell montering och greppning av oregelbundet formade föremål.Detaljer
- Humanoid fingerledsdesign robotisk fingerfärdig handDen robotiska fingerfärdiga handen är en robotändeffektor som i hög grad efterliknar den mänskliga handen. Den använder en antropomorf design med fem fingrar och simulerar den mänskliga handens ledrörelser genom mer än 15 frihetsgrader för att möjliggöra finmotoriska operationer som gripande och nypande. Den är robotens kärnkomponent för att utföra komplexa uppgifter. Den tillhör gripdonstypen inom robotändeffektorer. Till skillnad från den traditionella tvåfingersgriparen har den multimodal perception och intelligent styrning, kan anpassa sig till oregelbundna objekt och utföra precisionsuppgifter.Detaljer








Elektrisk gripare
 HONPINE WEPG-serien elektriska gripdon med vägning för livsmedelsindustrinHONPINE WEPG-serien med elektriska gripdon med vägning omfattar för närvarande modellerna WEPG01, WEPG05, WEPG-T08 och WEPG-T15, med maximala nyttolaster på 1 kg, 5 kg, 8 kg respektive 15 kg. Detta sortiment uppfyller fullt ut viktkraven inom produktion av litiumbatterier och täcker de flesta industriella vägningsapplikationer.
HONPINE WEPG-serien elektriska gripdon med vägning för livsmedelsindustrinHONPINE WEPG-serien med elektriska gripdon med vägning omfattar för närvarande modellerna WEPG01, WEPG05, WEPG-T08 och WEPG-T15, med maximala nyttolaster på 1 kg, 5 kg, 8 kg respektive 15 kg. Detta sortiment uppfyller fullt ut viktkraven inom produktion av litiumbatterier och täcker de flesta industriella vägningsapplikationer.
Utöver den breda användningen i produktionslinjer för litiumbatterier har WEPG-serien även framgångsrikt implementerats inom fordonsindustrin, läkemedelsindustrin och livsmedelsindustrin, med referenskunder inom flera sektorer. Serien stöder även kundanpassade lösningar för vägningsapplikationer i flera scenarier.Detaljer HONPINE EPG-FLEX-seriens elektriska parallellgripare för precisionstillverkningI takt med framväxten av flexibel tillverkning i små serier med många varianter har snabb omkonfigurering av automationsutrustning blivit avgörande. Traditionella elektriska gripdon med fast konstruktion har ofta svårt att möta frekventa förändringar i produktionsprocesser och tillämpningsscenarier.
HONPINE EPG-FLEX-seriens elektriska parallellgripare för precisionstillverkningI takt med framväxten av flexibel tillverkning i små serier med många varianter har snabb omkonfigurering av automationsutrustning blivit avgörande. Traditionella elektriska gripdon med fast konstruktion har ofta svårt att möta frekventa förändringar i produktionsprocesser och tillämpningsscenarier.
HONPINE EPG-FLEX-serien med elektriska parallellgripdon är utformad för att möta detta behov, baserat på ett koncept med modulär standardisering och flexibel konfiguration. Som en avancerad uppgradering i HONPINEs portfölj av elektriska gripdon erbjuder EPG-FLEX-serien en mer anpassningsbar lösning för komplexa industriella automationsmiljöer.
Serien har visat stark prestanda i tillämpningar som montering av komponenter av flera typer inom 3C-elektronikindustrin, växling mellan flera stationer i produktionslinjer för ny energi och stödjande materialhantering inom halvledartillverkning.Detaljer Elektrisk parallellgripare för industriell automation ersätter enkelt pneumatiska gripareHONPINE EPG-ST-seriens elektriska parallellgripare är utformade som en kostnadseffektiv ersättning för traditionella pneumatiska gripare i plock-och-placera- och materialhanteringsapplikationer. Med integrerad motor, drivenhet och styrenhet möjliggör de direkt ersättning av pneumatiska gripare i samma storlek utan att befintliga produktionslinjer behöver modifieras. Jämfört med pneumatiska lösningar minskar EPG-ST-serien förbrukningen av tryckluft, förenklar installation och drift samt ger bättre kontroll och tillförlitlighet. EPG-ST-serien är beprövad i applikationer som montering av 3C-elektronik, hantering av batterier inom ny energi och laboratorier inom livsvetenskap, och erbjuder en effektiv, användarvänlig lösning för att påskynda övergången från pneumatisk till elektrisk automation.Detaljer
Elektrisk parallellgripare för industriell automation ersätter enkelt pneumatiska gripareHONPINE EPG-ST-seriens elektriska parallellgripare är utformade som en kostnadseffektiv ersättning för traditionella pneumatiska gripare i plock-och-placera- och materialhanteringsapplikationer. Med integrerad motor, drivenhet och styrenhet möjliggör de direkt ersättning av pneumatiska gripare i samma storlek utan att befintliga produktionslinjer behöver modifieras. Jämfört med pneumatiska lösningar minskar EPG-ST-serien förbrukningen av tryckluft, förenklar installation och drift samt ger bättre kontroll och tillförlitlighet. EPG-ST-serien är beprövad i applikationer som montering av 3C-elektronik, hantering av batterier inom ny energi och laboratorier inom livsvetenskap, och erbjuder en effektiv, användarvänlig lösning för att påskynda övergången från pneumatisk till elektrisk automation.Detaljer Högprecisions ZR linjär roterande rotationsaktuatorDen linjära rotationsaktuatorn (även känd som ZR-aktuatorn) är en högt integrerad tvådimensionell rörelsemodul som kombinerar linjär lyftning (Z-axis) och 360° rotation (R-axis). Den använder en linjärmotor för exakt linjär rörelse och en servomotor för att driva rotationsrörelsen. Genom att kombinera de två axlarna kan den utföra synkroniserade sammansatta rörelser såsom lyftning, rotation och vinkelkalibrering. Den är idealisk för högprecisionsapplikationer såsom placering av halvledarchip och precisionsmontering.Detaljer
Högprecisions ZR linjär roterande rotationsaktuatorDen linjära rotationsaktuatorn (även känd som ZR-aktuatorn) är en högt integrerad tvådimensionell rörelsemodul som kombinerar linjär lyftning (Z-axis) och 360° rotation (R-axis). Den använder en linjärmotor för exakt linjär rörelse och en servomotor för att driva rotationsrörelsen. Genom att kombinera de två axlarna kan den utföra synkroniserade sammansatta rörelser såsom lyftning, rotation och vinkelkalibrering. Den är idealisk för högprecisionsapplikationer såsom placering av halvledarchip och precisionsmontering.Detaljer Industriell intelligent robot servoelektrisk gripdonRobotens elektriska gripdon är en intelligent ändeffektor driven av en servomotor, utformad för industriella automationsscenarier, och kan uppnå exakt materialgrepp, hantering och montering i robotens ände. Dess kärna består av en motor, en reduktionsmekanism, en sensor och ett styrsystem, och stöder adaptivt grepp med precision på millimeternivå till mikrometernivå, och är lämplig för flexibel produktion av mikroarbetsstycken såsom elektroniska komponenter, medicinsk utrustning och precisionsdelar.Detaljer
Industriell intelligent robot servoelektrisk gripdonRobotens elektriska gripdon är en intelligent ändeffektor driven av en servomotor, utformad för industriella automationsscenarier, och kan uppnå exakt materialgrepp, hantering och montering i robotens ände. Dess kärna består av en motor, en reduktionsmekanism, en sensor och ett styrsystem, och stöder adaptivt grepp med precision på millimeternivå till mikrometernivå, och är lämplig för flexibel produktion av mikroarbetsstycken såsom elektroniska komponenter, medicinsk utrustning och precisionsdelar.Detaljer 360° exakt styrd elektrisk roterande gripdonsslutenhetDet elektriska roterande gripdonet är en mekatronisk slutenhet som kombinerar grip- och rotationsfunktioner. Det driver kugghjuls- eller synkronremsmekanismen genom den inbyggda servomotorn för att uppnå synkron rotation under arbetsstyckets gripprocess (såsom åtdragning av flaskkapsyler och montering av kugghjul). Dess kärna består av en motor, en växelreducerare, en gripmekanism och en styrenhet. Det stöder 360° rotation utan döda vinklar och exakt styrning av rotationsvinkeln, och är lämpligt för scenarier som automatiserade monteringslinjer och drift av laboratorieinstrument.Detaljer
360° exakt styrd elektrisk roterande gripdonsslutenhetDet elektriska roterande gripdonet är en mekatronisk slutenhet som kombinerar grip- och rotationsfunktioner. Det driver kugghjuls- eller synkronremsmekanismen genom den inbyggda servomotorn för att uppnå synkron rotation under arbetsstyckets gripprocess (såsom åtdragning av flaskkapsyler och montering av kugghjul). Dess kärna består av en motor, en växelreducerare, en gripmekanism och en styrenhet. Det stöder 360° rotation utan döda vinklar och exakt styrning av rotationsvinkeln, och är lämpligt för scenarier som automatiserade monteringslinjer och drift av laboratorieinstrument.Detaljer Snabb stabil elektrisk parallellgripare för robotDen elektriska parallellgriparen är en innovativ robotändeefektor som uppnår snabb och stabil gripning av objekt genom exakt motordrift och transmissionsmekanism. Dess gripfingrar rör sig parallellt på ett plan, med en maximalt justerbar slaglängd på 0-180mm och en gripkraft per finger på 2N~800N. Den använder avancerad motorteknik och algoritmer för artificiell intelligens för att automatiskt justera gripmetoden i olika komplexa miljöer för att anpassa sig till olika objekts former, storlekar och positioner. Denna enhet kräver ingen extern luftkälla, har en kompakt struktur, stöder flera installationsmetoder och är lämplig för användning i små utrymmen.Detaljer
Snabb stabil elektrisk parallellgripare för robotDen elektriska parallellgriparen är en innovativ robotändeefektor som uppnår snabb och stabil gripning av objekt genom exakt motordrift och transmissionsmekanism. Dess gripfingrar rör sig parallellt på ett plan, med en maximalt justerbar slaglängd på 0-180mm och en gripkraft per finger på 2N~800N. Den använder avancerad motorteknik och algoritmer för artificiell intelligens för att automatiskt justera gripmetoden i olika komplexa miljöer för att anpassa sig till olika objekts former, storlekar och positioner. Denna enhet kräver ingen extern luftkälla, har en kompakt struktur, stöder flera installationsmetoder och är lämplig för användning i små utrymmen.Detaljer







Mikro elektrisk cylinder

Elektrisk vakuumsugkopp
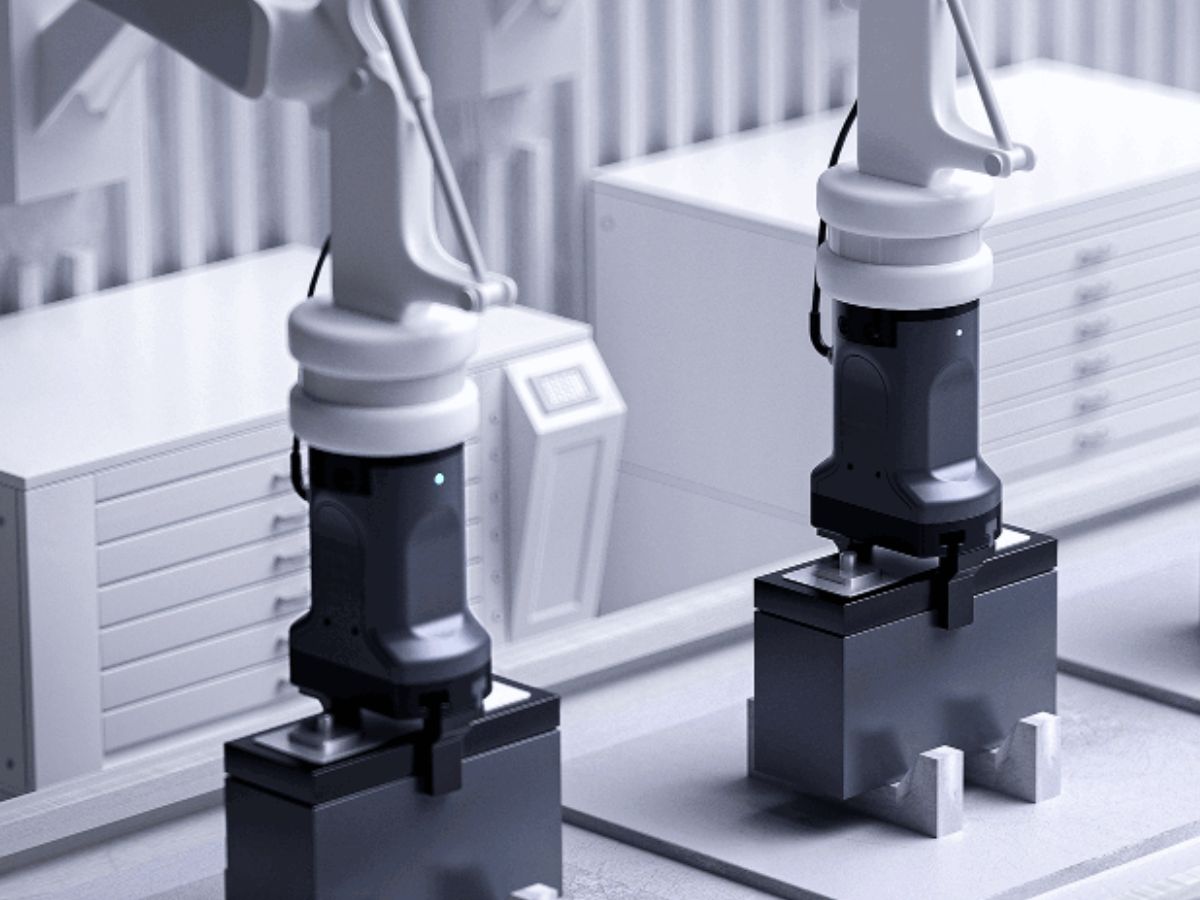
 EVS-seriens elektriska vakuumaktuator för industriell automation och palleteringDen elektriska vakuumaktuatorn HONPINE EVS Series är en kompakt och energieffektiv EOAT-lösning utformad för industriell automation, såsom plockning och placering, palletering och materialhantering.
EVS-seriens elektriska vakuumaktuator för industriell automation och palleteringDen elektriska vakuumaktuatorn HONPINE EVS Series är en kompakt och energieffektiv EOAT-lösning utformad för industriell automation, såsom plockning och placering, palletering och materialhantering.
Med en vikt på endast 2.5 kg och en lastkapacitet på upp till 10 kg levererar den stark prestanda i en lätt konstruktion. Den drivs av ett 24 V lågspänningssystem och minskar energiförbrukningen till cirka 20% jämfört med traditionella pneumatiska system, vilket bidrar till lägre driftskostnader.
EVS har justerbar sugkraft från 102 N till 510 N för olika arbetsstycken. Den kompakta designen är 30% mindre än pneumatiska lösningar, vilket gör den lämplig för robotapplikationer med begränsat utrymme.
Med direkt montering på robot, vakuumåterkoppling i realtid och intelligenta övervakningsfunktioner säkerställer EVS stabil, effektiv och tillförlitlig drift i automatiserade produktionslinjer.Detaljer Robot elektrisk vakuumsugkoppRobotens elektriska vakuumsugkopp är ett elektriskt drivet ändverktyg baserat på principen om vakuumadsorption. Den använder en inbyggd vakuumpump för att generera undertryck för objektgrepp, vilket effektivt ersätter traditionella manuella hanteringsmetoder. Kärndesignen integrerar ett intelligent styrsystem och en flerskikts tätningsstruktur, vilket gör den lämplig för hantering av släta eller lätt grova ytor såsom kakel, stenplattor och glas.Detaljer
Robot elektrisk vakuumsugkoppRobotens elektriska vakuumsugkopp är ett elektriskt drivet ändverktyg baserat på principen om vakuumadsorption. Den använder en inbyggd vakuumpump för att generera undertryck för objektgrepp, vilket effektivt ersätter traditionella manuella hanteringsmetoder. Kärndesignen integrerar ett intelligent styrsystem och en flerskikts tätningsstruktur, vilket gör den lämplig för hantering av släta eller lätt grova ytor såsom kakel, stenplattor och glas.Detaljer


Fingerfärdig robothand- FAQ
Inom robotik är en ändeffektor det verktyg som är fäst vid änden av en robotarm och som interagerar med den yttre miljön. Även känd som End-of-Arm Tooling (EOAT), definieras den av ISO-standarder som en enhet som är ansluten till robotarmen via en fläns för uppgiftsutförande, och betraktas inte som en del av själva robotarmen.
Inom robotkinematik är ändeffektorn i huvudsak robotens ”hand.” Koordinatsystemet som är fäst vid den kallas verktygsramen, vars origo vanligtvis definieras som Tool Center Point (TCP). Användare kan också anpassa TCP för specifika uppgifter, till exempel genom att ange spetsen på ett svetsmunstycke som TCP vid robotsvetsning.
Vanliga ändeffektorer inkluderar gripdon, verktygsväxlare, svetspistoler, sugkoppar och sprutpistoler. Sensorer kan också integreras för att förbättra uppgiftsprestanda och precision.
1. Fingerfärdiga händer
Fingerfärdiga händer är ändeffektorer med hög DOF som efterliknar mänskliga händer, vilket möjliggör gripande, vridning, rotation och andra komplexa uppgifter för humanoida robotar.
2. Ändeffektorer av klämtyp
Dessa använder mekaniska gripare för att hålla föremål säkert och används vanligtvis inom industriell automation.
3. Ändeffektorer av vakuum-/sugtyp
Dessa använder vakuumsug för hantering av platta eller lätta föremål såsom glas, förpackningar och elektronik.
4. Specialiserade ändeffektorer
Specialutformade verktyg för specifika uppgifter såsom svetsning, målning, polering eller kirurgi.
A. Lastkapacitet
Inkluderar vikten av både ändverktyget och föremålet som hanteras. Vridmoment som orsakas av föremålets tyngdpunktsläge måste ligga inom robothandledens lastgräns.
B. Frihetsgrader (DOF)
Grundläggande gripdon har vanligtvis en DOF (öppna/stäng), medan komplexa uppgifter kan kräva flera DOF, vilket ökar flexibiliteten men också kostnaden och styrningens komplexitet.
C. Precision och repeterbarhet
Högprecisionsuppgifter kräver repeterbarhet på mikronnivå. Elektriska gripdon erbjuder vanligtvis bättre positionskontroll än pneumatiska.
D. Miljöanpassningsförmåga
Särskilda konstruktioner kan behövas för extrema temperaturer, renrum eller explosionssäkra industriella miljöer.
E. Verktygsväxlarsystem
Automatiska verktygsväxlare gör det möjligt för robotar att snabbt byta uppgifter genom tillförlitliga mekaniska, elektriska och pneumatiska/hydrauliska anslutningar.
För att humanoida robotar verkligen ska kunna ersätta människor i uppgifter som att greppa, bära, montering, vridning och manipulation, måste dessa handlingar i slutändan utföras genom ”händerna.”
Som robotens end effector fungerar den fingerfärdiga handen som det direkta fysiska gränssnittet mellan roboten och omvärlden. Dess prestanda avgör i grunden de praktiska kapacitetsgränserna för roboten.
Utan fingerfärdiga händer kan humanoida robotar kanske ”se” och ”gå,” men de kan inte verkligen ”göra.”
Detta är anledningen till att Elon Musk har beskrivit den fingerfärdiga handen som en av de svåraste tekniska utmaningarna i utvecklingen av Optimus.
Den nya generationens modulära humanoida fingerfärdiga hand, Linker Hand L30, har 22 frihetsgrader i hela handen och integrerar biomimetiska principer på djupet med avancerad mekatronisk teknik.
Samtidigt som den uppnår en mycket antropomorf design, innehåller den också högprecisionsstyrning och realtidsavkänningskapacitet. Kärnledernas hastigheter överstiger 400°/s, och fullständig öppning eller stängning av handen kan slutföras på bara 0.2 sekunder.
Dess högsnabba rörelseprestanda och precisa manipulation har imponerat på publiken vid livedemonstrationer.
HONPINEs fingerfärdiga hand uppnår en optimal balans mellan prestanda och kostnad genom egenutvecklade lågkostnadsdrivmoduler i kombination med ramverk för algoritmer med öppen källkod.
Detta stöds ytterligare av Kinas väletablerade ekosystem för leveranskedjan. Dessutom ger omfattande tillämpningar i industriella och medicinska scenarier rikliga verkliga data för snabb teknologisk iteration. Tillsammans utgör dessa faktorer den grundläggande kärnan för att bygga en globalt konkurrenskraftig “Kina-baserad teknologilösning.”
Genom att utnyttja en biomimetisk sen-driven struktur, högprecisions vridmomentskontroll, och snabb dynamisk respons, uppvisar HONPINE:s fingerfärdiga händer enastående förmåga till finmanipulation.
De visar fullt ut de tekniska fördelarna med samordning av flera frihetsgrader och kraftstyrd perception, vilket möjliggör precisa, stabila, och fingerfärdiga robotrörelser med handen.
Passiva frihetsgrader (DoF):
Dessa frihetsgrader aktiveras inte direkt av motorer. I stället överförs rörelse genom mekaniska element såsom kugghjul, senor eller länkage, vilket möjliggör adaptiv rörelse driven av externa krafter eller kopplade leder.
Aktiva frihetsgrader (DoF):
Dessa frihetsgrader styrs direkt och automatiskt av motorer, vilket möjliggör exakt, programmerbar rörelse- och kraftstyrning.
Själva handen integrerar inte en inbyggd visionssensor. En extern visionsmodul kan dock läggas till för att möjliggöra visuell perception.
För taktil perception krävs kapacitiva eller piezoresistiva (resistiva) sensorkuddar för att detektera kontakt, tryck, och interaktionskrafter.
Specifikationerna för de piezoresistiva och kapacitiva sensorerna kommer att tillhandahållas enligt din specifika produktkonfiguration och dina valkrav.
Ja, vi erbjuder teleoperationshandskar, och deras prissättning är mer konkurrenskraftig än de flesta alternativen på marknaden.
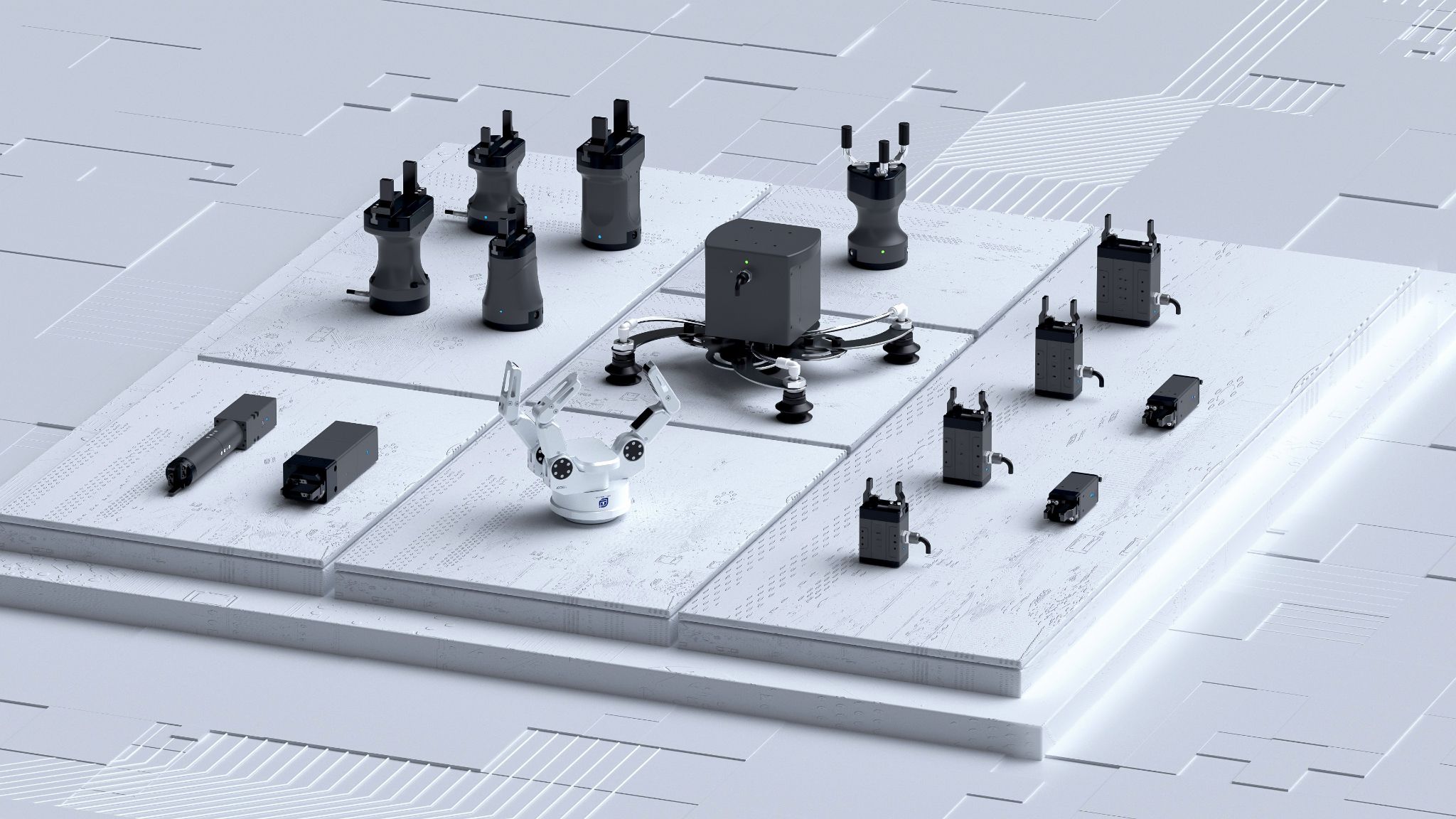
Tillämpning av robotändeffect
Robotändeffectorer erbjuder nio serier inklusive industriella fingerfärdiga händer, smarta elektriska gripdon, elektriskasugkoppar, och multifunktionella modeller för medicinsk automation, litiumbatteri, 3C, halvledar- ochlivsmedelsindustrier. Kompakt i design, säkerställer våra ställdon hög precision, hög styvhet, och ultraslaglängd med
noggrann kraftkontroll. De stöder nätverksapplikationer, är enkla att installera, och enkla att använda—och erbjudersäkra, effektiva automationslösningar för olika produktionsbehov.
‹

›

- 00
0000-00
Vad är en robotledsställdon?Hur väljer man det bästa roterande ställdonet för robotleder?
- 00
0000-00
DD-motorer VS harmoniska roterande ställdon
- 00
0000-00
OMG Ultrakompakt harmonisk drivledmodul med inbyggd vridmomentsensor
- 00
0000-00
HONPINE harmonisk växel, RV-växel, planetväxel bidrar till utvecklingen av humanoida robotar
- 00
0000-00
Harmonisk växelreduktionsteknik: arbetsprincip, tillverkningshinder och branschinsikter





